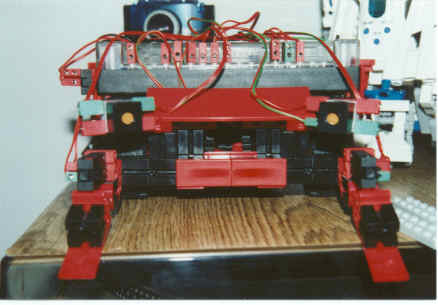
Habitat: Ein runder Tisch.
Verhalten: Bei Dunkelheit keine Aktivität. Fällt
Licht auf die Augen, wendet sich der Robot der Lichtquelle zu
und bewegt sich je nach Helligkeit in drei Geschwindigkeitsstufen
unterschiedlich schnell darauf zu.
Ertastet der Robot einen Abgrund, fährt er zurück,
wendet sich vom Abgund ab und nimmt die Lichtverfolgung wieder
auf.
Als Augen dienen zwei ältere FT-Fotozellen/Lichtsensoren.
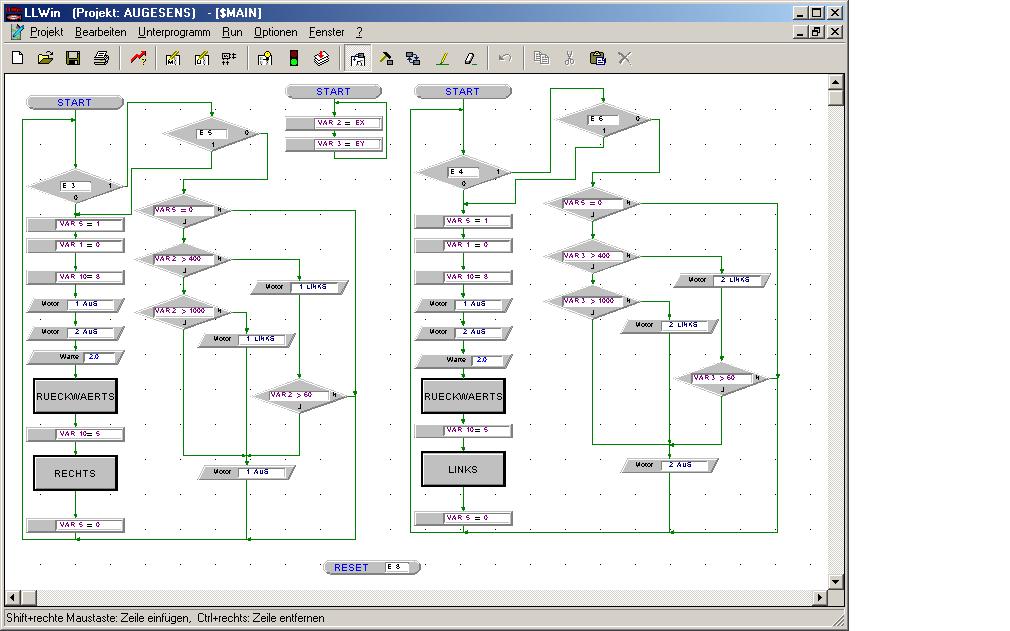
Die Drosselung der Motoren erfolgt mit einer auf den FT-Seiten
vorgeschlagenen Software-Methode (COPMPUTING -> SOFTWARE ->
DREHZAHL).
Programmierung in LLWIN (Hauptprogramm siehe unten).

 Andreas
Thiele
Andreas
Thiele